Deep Learning in Forth
Part I
August 28, 2021
Overview
- Machine Learning is EXCITING!
- Why are neural networks "suddenly" working?
- Forth has a role to play!!!
- Introduce core Deep Learning
- Build a performant foundation in Forth
- More Next Time!
Caveat
I am not an ML expert!https://commons.wikimedia.org/wiki/File:Alphago_logo_Reversed.svg
- Monte-Carlo tree search guided by policy and value networks
- Bootstrapped from studying human games
- Quickly defeats human players
- Oct 2015 - 5:0 against Fan Hui (professional player)
- Mar 2016 - 4:1 against Lee Sedol
- May 2017 - 60:0 against professional including Ke Jie (#1 player)
- 2017 - AlphaGo Zero, bootstraped from scratch, single computer with 4 TPUs
StyleGAN (2019)

DALE-E (2021)
 -----
-----

Deep Nostalgia (2021)
AI Dungeon - GPT-3 (2021)
Generative Pre-trained Transformer 3
You are Gus the Destroyer, a knight living in the kingdom of Larion. You have a steel longsword and a wooden shield. You are on a quest to defeat the evil dragon of Larion. You've heard he lives up at the north of the kingdom. You set on the path to defeat him and walk into a dark forest. As you enter the forest you see a pale man. He is dressed in a white sleeveless shirt, brown pants, and boots. His head is completely hair and his face is expressionless. You draw your sword as the man stares at you.
> You ask where the dragon is.
"Where is the dragon?" you ask.
"What?" the man asks as he begins to look a little more alert.
"I asked where the dragon is, I want to kill him."
> You search the man.
You check the man for weapons but he is completely unarmed.
"Bah, you are new. Dragons are hard to kill, easier if you aren't a moron like you." The man sputters at you.
> You head into the forest.
You set off towards the north of the forest. You walk slowly to the point where you are a good hour away from the pale man. A flock of small birds fly through the air and land on a nearby branch.
> You look at birds.
You look down at the flock of birds. They are small birds and are chirping merrily away. They are in pretty bad shape.
Github Copilot - GPT-3 (2021)

Why is this suddenly working?
- Core idea from 1986 (Backpropagation), why now?
- LOTS more compute
- Moore's Law
- GPUs & TPUs
- Cloud Computing
- LOTS more data
- Digital Cameras
- Solid State Storage
- The Internet
- Better techniques & fixed early mistakes
Where does Forth fit in?
- Deep Learning involves powerful,
but SIMPLE ideas - Interactivity is important, not high-level performance (Python is the dominant language)
- Small ML models fit in embedded devices
- Big new things shift what's important
Deep Learning in a Nutshell
- AI, Neurons, Aritificial Neurons, and Perceptrons
- Layers as Matrices (and Tensors)
- How "Deep" Learning Works
- Crucial details for making it work well
Approaches to AI
- Symbolic
- Popular initially
- Appealing because of Platonic ideal of knowledge
- Tractable because of limitations of early computers
- Connectionist
- Now very hot
- Appealing because it appears to mirror the brain
- Also appealing because it offers a model for "learning"
- Downside: "unexplainable" systems
Neurons
- Firing frequency varies by stimulus
- Learning mechanism poorly understood

https://en.wikipedia.org/wiki/Artificial_neural_network#/media/File:Neuron3.png
Artificial Neurons
- Mathematical / Engineering construct, inspired by biology
- Variations in layering and activation function
wi,j = synapse weight, bj = bias
A = activation function
Matrix Representation
- Each layer is a matrix multiply with activation applied to each element

Network Layers
- Input/Ouput + zero or more "hidden" layers
- Multiple layers required for complex functions

Perceptron - 1958
- Hardware Artificial Neural Network
- Single Layer (Linear Planes)
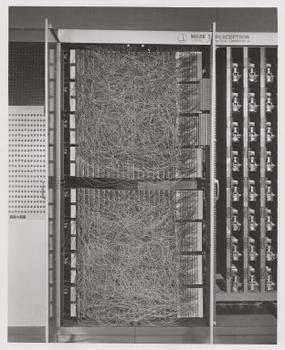
https://en.wikipedia.org/wiki/Perceptron
Improvements + Advances
- Automatic Differentiation
- Better Initialization
- Better Activation Functions
- Better Layers
- Better Overall Structure
How to Learn
- Tune the network so that training input → output values produce the expected results
- Treat the whole network as a function
F, and minimizeLoss(F(input), expected) - Use a "loss function", like sum of squares or distance sum

How to Learn
- Gradient Descent on weights and biases
- Move "downhill" in n-dimensions
- Need to be able to differentiate whole neural network + loss function
Ways to find a Derivative
- Symbolic Differentiation
- Numeric Differentiation
- Automatic Differentiation
Automatic Differentiation
- Compute the function for particular input
- Use intermediate results with chain rule to find derivative at that same input point
- Two approaches (for function for ℝn → ℝm)
- Forward Accumulation (better if n << m)
- Reverse Accumulation (better if n >> m)
- Minimizes round-off error
Chain Rule
Multivariable Chain Rule
Forward Accumulation

https://en.wikipedia.org/wiki/Automatic_differentiation#/media/File:ForwardAccumulationAutomaticDifferentiation.png
Reverse Accumulation

https://en.wikipedia.org/wiki/Automatic_differentiation#/media/File:ReverseaccumulationAD.png
AutoDiff with Matrices
- Reverse Accumulation generalizes to matrices!
- Product rule works as you would expect
- Per-element operations also generalize
Initialization
- Biases - zero
- Random weights to balance variance between layers.
\[ Glorot Uniform: Random(-limit, limit) \\ limit = \sqrt{\frac{6}{fan_{in} + fan_{out}}} \]
Activation Functions
| \[ tanh(x) = \frac{e^{x} - e^{-x}}{e^{x} + e^{-x}} \] |  |
| \[ logistic(x) = \frac{1}{1 + e^{-x}} \] |  |
| \[ relu(x) = max(0, x) \] |  |
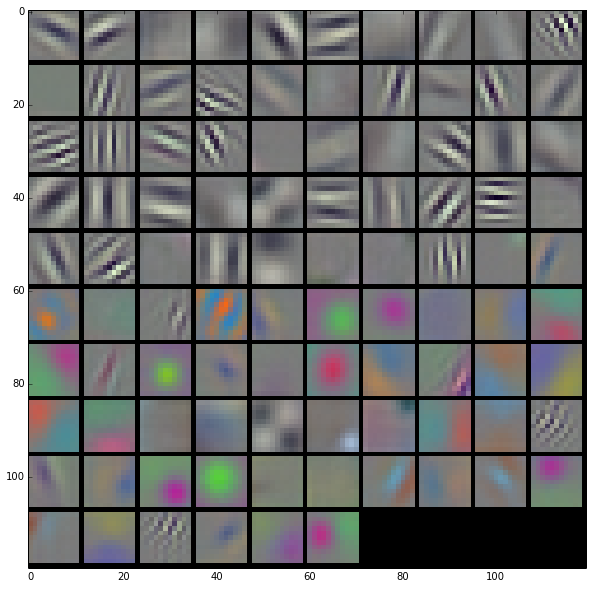
Convolutional Neural Networks
- Image recognition of low level features should be the same throughout the visual field
- Why relearn it over and over?
- Apply the same windowed network throughout the image!

Discrete Convolution
\[ (f * g)[n] = \sum_{m=-\infty}^{\infty} f[n - m] g[m] \]2D Discrete Convolution
\[ (f * g)[x, y] = \sum_{i=-\infty}^{\infty} \sum_{j=-\infty}^{\infty} f[x - i, y - j] g[i, j] \]2D Discrete Convolution
| Identity |  |
 |
| Edge Detection |  |
 |
| Gaussian Blur |  |
 |
Convolutional Filters
Other Structures
- Generative Adversarial Networks
- Recurrent Neural Networks
- Transformer Recurrent Neural Networks
Pivot to Performance
- We are doing LOTS of matrix operations!
- Matrix multiply will dominate, it's O(n3) when done naively
- Strassen's algorithm is O(nlog27) ≈ O(n2.807)
- Best theoretical as of 2020 is O(n2.3728596), but has "galactic" constants
- How to best use the hardware?
BLAS
Basic Linear Algebra Subprograms
- FORTRAN Library
- Terse ≤6 character names
- Standard "Kernels"
- Strided Data
Strided Data

Type Convensions
SGEMM
DGEMM
CGEMM
ZGEMM
- S = Single precision (32-bit) floats
- D = Double precision (64-bit) floats
- C = Single precision complex (2 x 32-bit) floats
- Z = Double precision complex (2 x 64-bit) floats
BLAS - Level 1 (1979)
- *ROTG + SROT - Givens rotation
- *SWAP - Swap two vectors
- *SCAL - Vector scaling x = a*x
- *COPY - Vector copy
- *AXPY - Vector scale and add y = a*x + y
- *DOT - Dot product
- *NRM2 - Euclidean norm / vector length
- *ASUM - Vector sum of absolute values
- I*AMAX - Index of max absolute value
BLAS - Level 2 (1984-88)
- *GEMV - Matrix Vector Multiply \[ y := \alpha A x + \beta y \]
- *GER - Row-column Vector multiply \[ A := \alpha x y^T + A \]
- Matrix-vector operations on symmetric/triangular matrices stored in banded or packed format.
- Transpose generously supported.
BLAS - Level 3 (1990)
- *GEMM - Matrix Matrix Multiply \[ C := \alpha A B + \beta C \]
- Matrix-matrix operations on symmetric/triangular matrices stored in banded or packed format.
- Transpose generously supported.
SAXPY
SUBROUTINE saxpy(N,SA,SX,INCX,SY,INCY)
REAL SA
INTEGER INCX,INCY,N
REAL SX(*),SY(*)
INTEGER I,IX,IY,M,MP1
INTRINSIC mod
IF (n.LE.0) RETURN
IF (sa.EQ.0.0) RETURN
IF (incx.EQ.1 .AND. incy.EQ.1) THEN
m = mod(n,4)
IF (m.NE.0) THEN
DO i = 1,m
sy(i) = sy(i) + sa*sx(i)
END DO
END IF
IF (n.LT.4) RETURN
mp1 = m + 1
DO i = mp1,n,4
sy(i) = sy(i) + sa*sx(i)
sy(i+1) = sy(i+1) + sa*sx(i+1)
sy(i+2) = sy(i+2) + sa*sx(i+2)
sy(i+3) = sy(i+3) + sa*sx(i+3)
END DO
ELSE
ix = 1
iy = 1
IF (incx.LT.0) ix = (-n+1)*incx + 1
IF (incy.LT.0) iy = (-n+1)*incy + 1
DO i = 1,n
sy(iy) = sy(iy) + sa*sx(ix)
ix = ix + incx
iy = iy + incy
END DO
END IF
RETURN
END
Utilities
1 sfloats constant sfloat
1 dfloats constant dfloat
variable incx sfloat incx !
variable incy sfloat incy !
: sf, ( r -- ) here sf! sfloat allot ;
: df, ( r -- ) here df! dfloat allot ;
: sxsy+ ( sx sy -- sx' sy' ) incy @ + swap incx @ + swap ;
SAXPY
: saxpy ( sx sy n f: sa -- )
0 ?do over
sf@ fover f* dup sf@ f+ dup sf! sxsy+
loop 2drop fdrop ;
Basic Ops
: sswap ( sx sy n -- )
0 ?do dup sf@ over sf@ dup sf! over sf! sxsy+ loop 2drop ;
: sscal ( sx n f: sa -- )
0 ?do dup sf@ fover f* dup sf! incx @ + loop drop fdrop ;
: scopy ( sx sy n -- )
0 ?do over sf@ dup sf! sxsy+ loop 2drop ;
SDOT
: sdsdot ( sx sy n f: sb -- f: prod )
0 ?do over sf@ dup sf@ f* f+ sxsy+ loop 2drop ;
: sdot ( sx sy n -- f: prod ) 0e sdsdot ;
: dsdot ( sx sy n -- f: prod ) 0e sdsdot ;
Summing and Searching
: snrm2 ( sx n -- f: norm )
0e 0 ?do dup sf@ fdup f* f+ incx @ + loop drop fsqrt ;
: sasum ( sx n -- f: abssum )
0e 0 ?do dup sf@ fabs f+ incx @ + loop drop ;
: isamax ( sx n -- index )
over sf@ fabs 0 -rot 0 ?do
dup sf@ fabs fover f> if fdrop dup sf@ fabs nip i swap then
incx @ +
loop drop fdrop ;
Givens Rotation
\[ \left[\begin{matrix} c & -s \\ s & c \\ \end{matrix}\right] \left[\begin{matrix} a \\ b \\ \end{matrix}\right] = \left[\begin{matrix} r \\ 0 \\ \end{matrix}\right] \]
https://en.wikipedia.org/wiki/Givens_rotation
Givens Rotation
fvariable cos
fvariable sin
: srotg ( f: a b -- f: c s )
fdup f0= if fdrop fdrop 1e 0e exit then
fover fover fdup f* fswap fdup f* f+ fsqrt 1/f ( a b 1/h )
frot fdup f0<= if fswap fnegate fswap then ( b ~1/h a )
fover f* frot frot f* ;
: srot ( sx sy n -- )
0 ?do over sf@ cos sf@ f* dup sf@ sin sf@ f* f+
dup sf@ cos sf@ f* over sf@ sin sf@ f* f-
dup sf! over sf! incy @ + swap incx @ + swap loop 2drop ;
Cblas
- C wrapper around F77 BLAS
- Cleverly works around Row vs Column major order
void cblas_saxpy(const int N, const float alpha,
const float *X, const int incX,
float *Y, const int incY);
Row-Major vs Column-Major Order
- FORTRAN = Column-Major Order
- C = Row-Major Order
- Forth = \o/ No arrays,
I do what I want! - Transpose parameters
allow conversion

Cblas
: sfcell/ ( n -- n ) 2/ 2/ ;
c-function cblas_dsdot cblas_dsdot n a n a n -- r
: dsdot ( sx sy n -- f: prod )
-rot >r incx @ sfcell/ r> incy @ sfcell/ cblas_dsdot ;
c-function cblas_saxpy cblas_saxpy n r a n a n -- void
: saxpy ( sx sy n f: sa -- )
-rot >r incx @ sfcell/ r> incy @ sfcell/ cblas_saxpy ;
SAXPY / DAXPY - Level 1 Benchmark
- 1000x - Multiply and Adds of two 1M element vectors
- Try both single and double precision
- Compare Forth and BLAS
- Multiplies: 1 Billion
- Adds: 1 Billion
- BLAS Baseline: 0.454s
SAXPY / DAXPY - Level 1 Benchmark
1000000 constant test-size
1 sfloats incx ! 1 sfloats incy !
test-size sfloats allocate throw constant foo
foo test-size sfloats 33 fill
test-size sfloats allocate throw constant bar
bar test-size sfloats 33 fill
: benchmark
1000 0 do
123e foo bar test-size saxpy
loop
;
benchmark

SGEMV - Level 2 Benchmark
- 10x - Vector-Matrix Multiply of size 10K x 10K
- Compare Forth and BLAS
- Compare Forth at Level 1+ vs Level 2 only
- Multiplies: 1.0002 Billion
- Adds: 1.0002 Billion
- BLAS Baseline: 1.200s
SGEMV - Level 2 Benchmark
10000 constant test-size
1 sfloats incx ! 1 sfloats incy !
test-size test-size * sfloats allocate throw constant mat
mat test-size test-size * sfloats 33 fill
test-size sfloats allocate throw constant vec
vec test-size sfloats 33 fill
test-size sfloats allocate throw constant vec2
vec2 test-size sfloats 33 fill
test-size sfloats lda !
: benchmark
10 0 do
9e 1e mat vec vec2 test-size test-size sgemv
loop
;
benchmark

SGEMM - Level 3 Benchmark
- One 1000 x 1000 Multiply and Add
- Compare Forth and BLAS
- Compare Forth at Level 1+, Level 2+, and Level 3 only
- Multiplies: 1.002 Billion
- Adds: 1.002 Billion
- BLAS Baseline: 0.462s
SGEMM - Level 3 Benchmark
1000 constant test-size
1 sfloats incx ! 1 sfloats incy !
#NoTrans transa !
#NoTrans transb !
test-size test-size * sfloats allocate throw constant mat1
mat1 test-size test-size * sfloats 33 fill
test-size sfloats lda !
test-size test-size * sfloats allocate throw constant mat2
mat2 test-size test-size * sfloats 33 fill
test-size sfloats ldb !
test-size test-size * sfloats allocate throw constant mat3
mat3 test-size test-size * sfloats 33 fill
test-size sfloats ldc !
: benchmark
9e 1e mat1 mat2 mat3 test-size test-size test-size sgemm
;
benchmark

Intel MKL
- Intel oneAPI Math Kernel Library
- Linux, Windows, and OSX Intel Optimized Math Kernels
- Structured to heavily focus on Intel over AMD
- Implements BLAS and other kernels like FFT
- Takes advantage of: threads, memory layout, SIMD, the works
Wall Clock - System BLAS vs MKL BLAS

GigaFLOPS - System BLAS vs MKL BLAS

Wall Clock - System BLAS vs MKL BLAS

GigaFLOPS - System BLAS vs MKL BLAS

Speed!
- MKL SGEMM is 1,512x faster than high level Forth!
- But the layers were Matrix x Vector?
Batches

How to do fast convolution?
- Using a custom kernel could work, but would require optimizing another core operation
- Can we transform our input so that matrix multiplication becomes convolution?
im2col
\[ F * I = im2col(F, F_s) \cdot im2col(I, F_s) \]im2col
: im2col { src b w h c dst fw fh }
w h * c * sfloats { sb }
h c * sfloats { sw }
c sfloats { sh }
c fh * sfloats { shc }
src dst
b 0 do
over swap
w fw - 1+ 0 do
over swap
h fh - 1+ 0 do
over swap
fw 0 do
2dup shc cmove
shc + swap sw + swap
loop
nip
swap sh + swap
loop
nip
swap sw + swap
loop
nip
swap sb + swap
loop
2drop
;
im2col'
: im2col-size { b w h c fw fh } b w fw - 1+ * h fh - 1+ * c * ;
: im2col' { src b w h c dst fw fh }
dst b w h c fw fh im2col-size 0 fill
sfloat incx ! sfloat incy !
w h * c * sfloats { sb }
h c * sfloats { sw }
c sfloats { sh }
c fh * { shc# }
shc# sfloats { shc }
dst src
b 0 do
over swap
w fw - 1+ 0 do
over swap
h fh - 1+ 0 do
over swap
fw 0 do
2dup swap shc# 1e saxpy
shc + swap sw + swap
loop
nip
swap sh + swap
loop
nip
swap sw + swap
loop
nip
swap sb + swap
loop
2drop
;
im2col Performance
- ~1.8 sec for 1024 128x128x3 images
- ~7.6 sec for multiply
- NOTE: The resulting matrix can be reshaped into expected output in place
Tensors
- Many multidimensional tensors can be flattened to big matrices and correctly multiplied after adjusting shape
- This will let us batch many items together
Multiple Filters and Images

First Deep Learning Target Project
- Recognize handwritten digits
- Use a series of 3x3 convolution layers, followed by some dense layers
- Classify into 0-9
MNIST (1998)
- Handwritten digit dataset
- 28x28 grayscale
- 60,000 training images
- 10,000 test images
- Remixed of NIST high school student and census bureau datasets
IDX File Format
Big Endian
$00 - Magic # (byte)
$00 - Magic # (byte)
type - $08=uint8 $09=int8 $0B=int16 (byte)
$0C=int32 $0D=float32 $0E=float64
rank - Number of dimensions (byte)
dim 1 - Size in dimension 1 (int32)
.... ....
dim N - Size in dimension N (int32)
data - Raw data
Convert to Float
: u8tof32 ( a a n -- )
0 do
over c@ s>f dup sf!
1 sfloats + swap 1+ swap
loop 2drop ;
Convert to Float
\c void u8tof32(const uint8_t *src, float *dst, size_t n) {
\c for (;n;--n) {
\c *dst++ = *src++;
\c }
\c }
c-function u8tof32 u8tof32 a a n -- void
MNIST (1998)

Next Time
- Build Neural Network Layer Words
- Implicitly build a reverse pass to calculate the gradient
- Current Code tally: ~1,292 lines